
Hitachi Automotive Systems of Japan has developed a stereo camera that enables automatic emergency braking (AEB) at intersections relying on stereo camera alone by combining distant object detection with wide-angle view, and without millimetre-wave radar.
This is spurred in part by the growing need for technologies that enhance driving safety, particularly at intersections. In 2020, the country’s NCAP (New Car Assessment Programme) will include AEB as one of the criteria in its leading automotive safety performance assessment.
Sensor technologies with a horizontal, wide-angle view are necessary to detect pedestrians to avoid accidents when an automobile turns at an intersection. To achieve this, it is essential to continuously detect vehicles ahead and also required are a CMOS (Complementary Metal Oxide Semiconductor) with consistently high pixilation, the camera sensor, or a combination of multiple sensors, including a radar which detects objects in the surrounding area or in the distance.
Broader range of detection
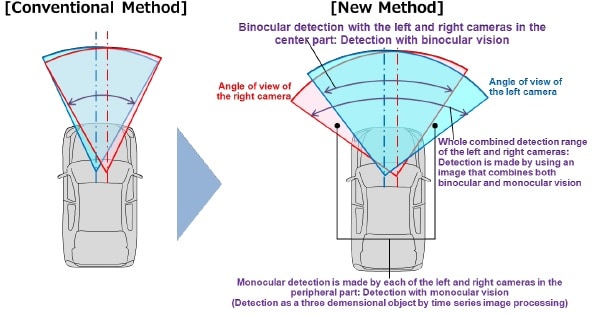
With its newly developed stereo camera, Hitachi Automotive Systems has increased the range of detection by widening the horizontal range of the stereo camera relative to conventional stereo cameras, and has adopted a method to shift images detected by the left and right cameras.
This delivers an angle of view three times wider compared to conventional stereo cameras, and enables Automatic Emergency Braking when turning at intersections while still maintaining the ACC (Adaptive Cruise Control) which employs compatible distant object detection without the need for a large increase in the number of sensor pixels compared to conventional stereo cameras.
The technology to change detection methods in the centre and periphery parts of the detection range was developed in collaboration with the Hitachi Ltd. R&D Group. Highly accurate detection and range estimation of pedestrians and cyclists improves safety at intersections while relying only upon the stereo camera, a minimal number of components. This is achieved by seamlessly integrating a number of features including centralized binocular detection through binocular vision, three-dimensional object detection through time series image processing provided by monocular vision in the periphery, and storage of identification patterns using machine learning methods.
In addition to developing technologies to enhance the stereo camera performance, Hitachi Group will continue to offer devices and solutions that contribute to the practical implementation of autonomous driving vehicles and the connected car.

